For Questions 1 & 2:
Dark Physics (like any other physics simulation) works by creating a physics object representing the actual object. In Dark physics such representation can take the form of a box, capsule, sphere, convex or mesh. The first three are straight forward, a convex or mesh will create a polygon-perfect representation, with convex applied when your object has no holes or sharp points.
If you absolutely need a polygon-perfect physics representation of your object then, currently, Dark Physics is not your best option.
Putting it simply, the current implementation of dynamic meshes/convex in Dark Physics make them completely unusable, with objects not included in the simulation or the physics object not reflecting its 3D counterpart.
In practice, since convex and meshes are CPU intensive, it is normal practice to represent the 3D object using a combination of boxes/spheres/capsules jointed together.
Regarding the simplicity of use, to include an object into the physics simulation requires just one additional command. Example:
make object cube 1,10 ` create the object
phy make rigid body dynamic box 1 ` create the physics representation. In this case a dynamic (i.e. moving) box representing object 1
For Question 3:
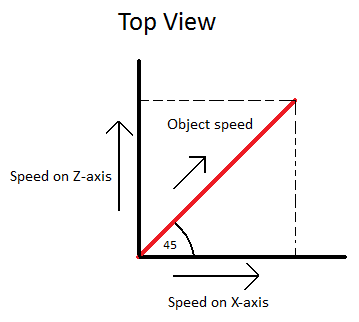
It will not give the actual speed of the object, but the speed it is moving on each axis. Example, if an object is moving on a plane at 45 degrees, you will not get the speed of the object but the speed on the X and Z axis, and since it is moving at 45 degrees both the X and Z speed will be equal.
Theory is when you know something, but it doesn't work. Practice is when something works, but you don't know why.
Programmers combine theory and practice: Nothing works and they don't know why.
